IR Line Track Module
<first published on Dec 26, 2012>
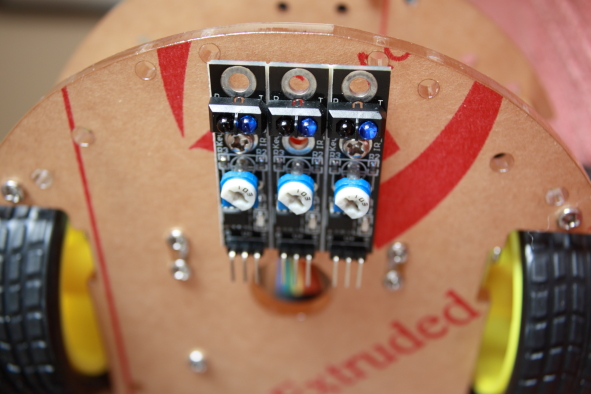
The Robot kit I’m building comes with three IR line tracking sensor modules. As with the other components, documentation is only available on the web. I have not found a source of information about how to use the sensors but it doesn’t seem to be that complicated.
— UPDATE —
The sensor has IR light emitter and detector. The sensor returns the status of the IR light reflected from a surface as ON or OFF. The status of the sensor is shown by the LED. The sensor needs to be calibrated to set the threshold between light and dark.
I managed to make the robot follow a curved line using only two sensors suing the sketch below. A complete line following solution will require all three sensors.
/*
Follows a line on the floor using 2 IR line sensors
This sketch will guide the robot to follow a wide circle
making left turns only
*/
#include <Motor.h>
Motor motor;
int time;
int dir = 0;
// the setup routine runs once when you press reset:
void setup() {
// initialize serial communication at 9600 bits per second:
Serial.begin(9600);
pinMode(10, INPUT);
pinMode(11, INPUT);
time = millis();
}
// the loop routine runs over and over again forever:
void loop() {
// read the input on analog pin 0:
int L = digitalRead(10);
int R = digitalRead(11);
// print out the value you read:
Serial.print(L);
Serial.print(",");
Serial.println(R);
int d = L - R;
if(L==1 && R==1) {
motor.turnRight(100);
}
if(L==1 && R==0) {
motor.onFwd(motor.Motor_LR, 100);
}
if(L==0 && R==0) {
motor.fwdLeft(100);
delay(5);
}
if(L==0 && R==1) {
motor.turnLeft(100);
delay(5);
}
// stops the robot after 2 minutes
if ((millis()-time) > 20000) {
motor.off(motor.Motor_LR);
return;
}
}