Arduino robot kit – Motor library
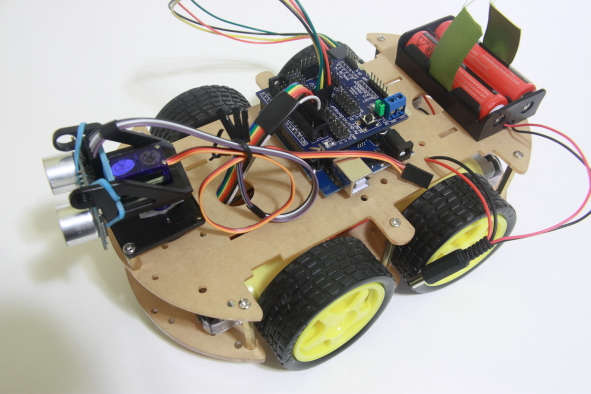
Once the motors were connected to the motor controller (see previous post), I started working on writing the code for basic robot movement. The basic motor commands are: onFwd/onRev: move each motor independently in the forward or reverse direction off/stop: stop either motor gradually (float) or abruptly (break) fwdRight/fwdLeft: turn the robot by running the two… Read more »