At this point, we can put the motion and the range sensing capabilities of the robot to good use. For autonomous motion (no remote control), the robot needs to use its range sensor to detect obstacles and avoid them by turning to another direction. The next sketch does that by moving… Read more »
I have created this wiring diagram for the connections between the motor controller, motors, and sensor shield. I’ll update it later to include other components. And here is an update that includes the servo motor and the range sensor. And here are the detailed pin assignments for all modules: Pin… Read more »
Once the motors were connected to the motor controller (see previous post), I started working on writing the code for basic robot movement. The basic motor commands are: onFwd/onRev: move each motor independently in the forward or reverse direction off/stop: stop either motor gradually (float) or abruptly (break) fwdRight/fwdLeft: turn the robot by running the two… Read more »
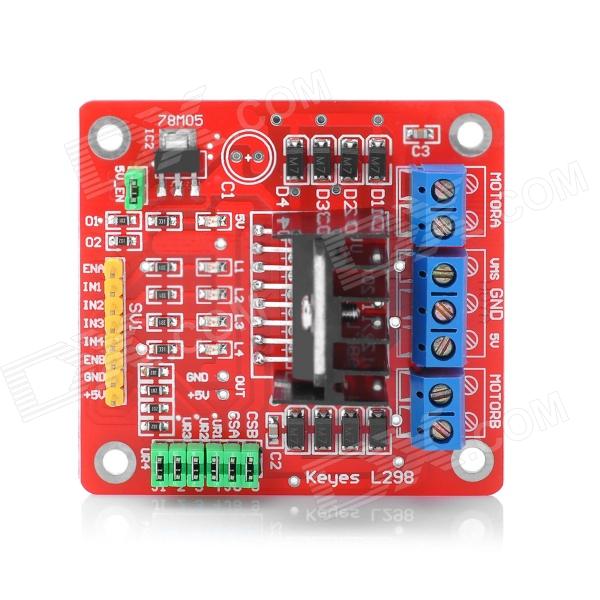
The motor controller module is based on L298N driver. The documentation for the module was hard to find but there are many boards that are based on the same driver. So, I was able to piece the information together and figure out how to use the module. L298N Controller Module L298N is a high voltage,… Read more »
Maen ArtimyComments Off on Arduino robot kit – Range sensor
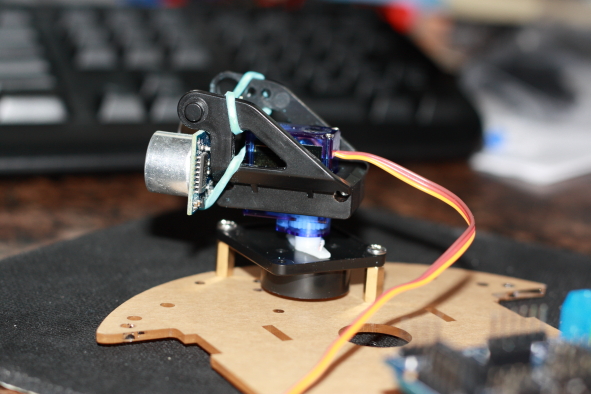
The robot kit includes an ultrasonic range sensor (HC-SR04), a 2kg-torque servo motor (TowerPro SG90), and a plastic holder that is supposed to attach the motor to the robot top plate and provide a base to attach the sensor. Unfortunately, the items are not totally compatible with each other, so I had… Read more »