At this point, we can put the motion and the range sensing capabilities of the robot to good use. For autonomous motion (no remote control), the robot needs to use its range sensor to detect obstacles and avoid them by turning to another direction. The next sketch does that by moving… Read more »
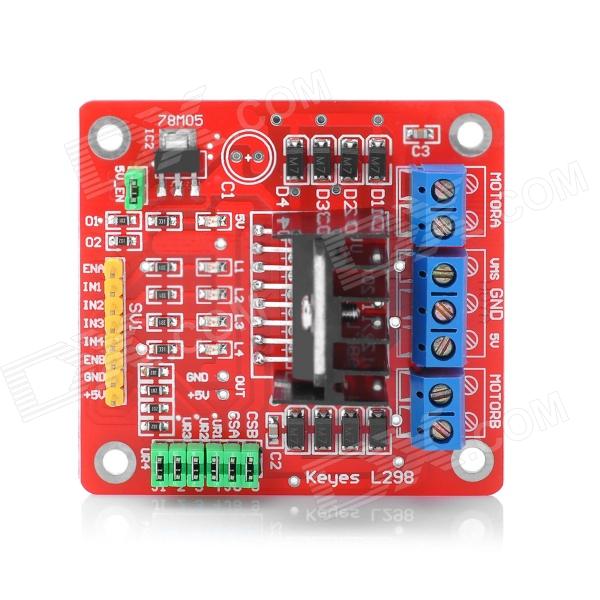
The motor controller module is based on L298N driver. The documentation for the module was hard to find but there are many boards that are based on the same driver. So, I was able to piece the information together and figure out how to use the module. L298N Controller Module L298N is a high voltage,… Read more »